Section6Modern 8¶ permalink
The 19th century also saw the development of topology, a rich field of study to this day. Topology may be described as the study of those features of an object that remain unchanged when the object is stretched, shrunk, or otherwise continuously changed. The topological viewpoint has shed new light on the greatness of \(8\text{,}\) just as it has dealt a blow to the individuality of several numbers.
A central question in topology is whether two given objects are topologically equivalent. That is, can one object be continuously changed until it looks like the other? For instance, 6 is topologically equivalent to 9: 6 can be gradually altered to look like 9 (just stand 6 on its head). It is also true that one, two, three, five and seven have topologically equivalent symbols, an obvious morale crusher to these numbers in desperate need of some sort of personal identity. In fact, each of these numbers is topologically equivalent to a straight line segment. Go ahead and check: with a piece of string you can form each of these numbers without changing the nearness relationship among the points of the string (e.g., you don't tie the ends of the string together, or cross it over itself, or cut it into pieces).
An important topological feature of a space is whether it is connected, and it is no exaggeration to say that topologists celebrate connected spaces. Sadly, most integers have disconnected symbols, a significant strike against them. For instance, -33 has a cumbersome 3 connected components. Of the integers, only 0 through 9 are connected.
But not all connected spaces are alike, and we can investigate this by considering cut points. A cut point in a connected space is a point whose removal would make the remaining space disconnected; and a measure of an object's resolve is how many points (other than endpoints) one can remove without disconnecting the remaining space.
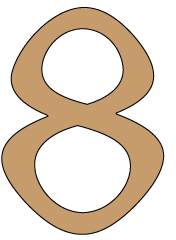
If you remove any such point from l, 2, 3, 5, or 7, you end up disconnecting the digit, as suggested in Figure 6.1. With 0, 4, 6, and 9 one can find a point to snip that does not disconnect the space, but two snips will always disconnect these digits. Of the connected integers, \(8\) alone can survive two snips. Yes, \(8\) is the most resolute of the integers, topologically.
Now let's bump this topology discussion up a dimension. A surface is a space with the feature that every point in the space has a neighborhood around it that looks like a little circular patch of a sheet of paper, or a bicycle tube patch. A few surfaces are pictured in Figure 6.2: a sphere, a sphere with a handle (hoppity-hop!), a donut (bike tube!), and what we could call a four-holed donut (yummy!).
In the 1860s mathematicians managed to completely classify the compact and connected surfaces. There are infinitely many different ones, but we have a complete list of them. If you ran into a surface in a dark alley, it would be topologically equivalent to one of the surfaces on this well-known list. In fact, the (infinite) family of orientable surfaces may be described as follows: Each orientable surface is topolocially equivelent to a sphere with some number of handles attached to it. For instance, the donut is topologically the same as a sphere with one handle (which looks like the hoppity-hop in Figure 6.2) because one can be gradually morphed to look like the other. The four-holed donut is essentially a sphere with four handles.
How are surfaces germane to the story of \(8\text{?}\) It turns out each surface can be given exactly one of three types of geometric structures in which measurements are the same at every point in the space. The three possibilities for geometry are Euclidean, elliptic and hyperbolic. We won't dive into the details here, though they are dear to this author's heart (and are explored in detail in [4]). Rather, let us be content with stating this remarkable fact: except for the sphere and the donut, all of the orientable surfaces adhere to hyperbolic geometry.
This tells us that when you run into that surface in the dark alley, the probability is 1 that it adheres to hyperbolic geometry. So, if you are a two-dimensional bug named Bormit, and you assume your universe adheres to hyperbolic geometry, and you also believe in an Occam's Razor sort of way that it must be the simplest of all worlds, which world would it be? Interpreting “simplest” as “fewest number of handles”, Bormit's world would be the sphere with two handles. The author has taken the liberty of providing a spare rendition of this most magnificent of surfaces in Figure 6.3. Does it look like an homage to any particular number?
Of course our universe is not two-dimensional, but appears to us as three-dimensional. Fine, on to three dimensions. If we assume our universe has a nice geometric structure attached to it, it would adhere to one of the three geometries we've mentioned. Moreover, Einstein's theory of general relativity ties the geometry of the universe to how much mass and energy is in it.
A little notation might be helpful. It turns out that from Einstein's field equations, the mass-energy density of the universe, \(\rho\text{,}\) is related to its curvature \(k\) by the following equation, called the Friedmann Equation,
\begin{equation*} H^2 = 8G\frac{\pi}{3}\rho - \frac{k}{a^2}. \end{equation*}Here, \(H\) is the Hubble constant measuring the expansion rate of the universe; \(k = -1,0,\) or \(1\) is the curvature constant (\(k = -1\) corresponds to hyperbolic geometry, \(k=0\) to Euclidean, and \(k = +1\) to elliptic); \(G\) is Newton's gravitational constant; \(a\) is a scale factor; and \(\pi/3\) is practically just 1. Notice, please, the central role that \(8\) plays in this fundamental description of the universe on a global scale.